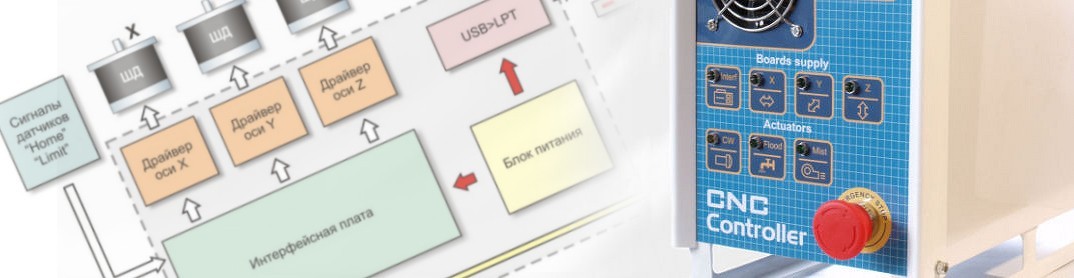


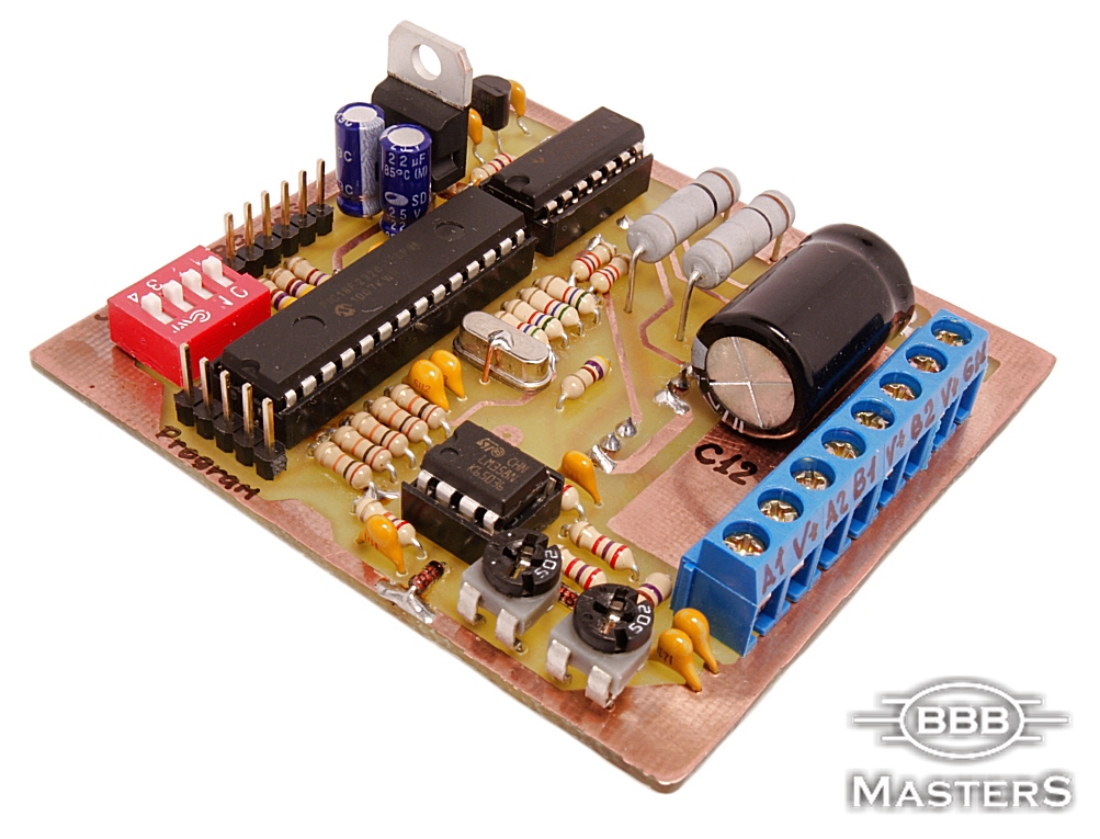
В данном материале представлен, используемый в блоке управления CNC Controller, контроллер униполярного шагового двигателя на основе микроконтроллера PIC18F2320. Контроллер поддерживает управляющие сигналы STEP, DIR и ENABLE. В контроллере реализован микрошаговый режим и режим удержания с понижением тока фаз. Информация была взята с сайта RoboZone.
Особенности контроллера униполярного двигателя PIC BINAR CNC 4.1:
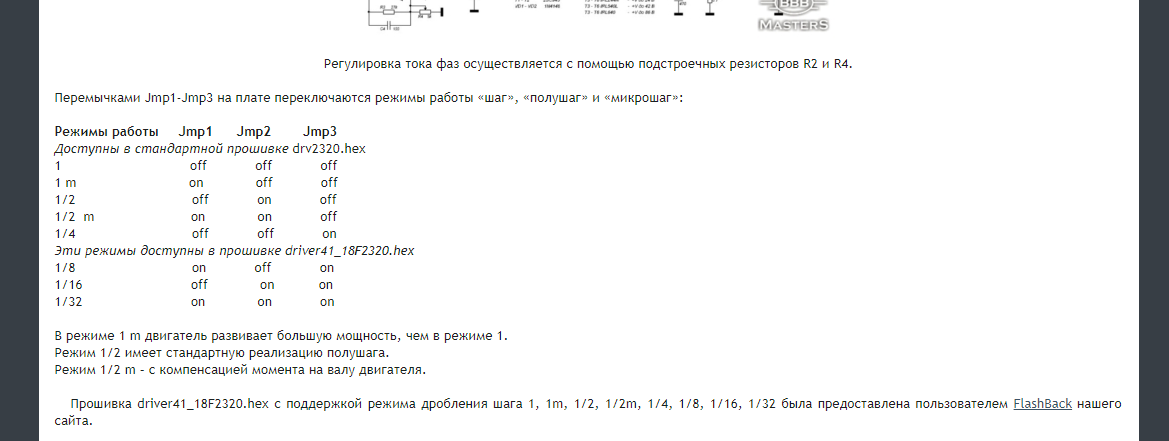
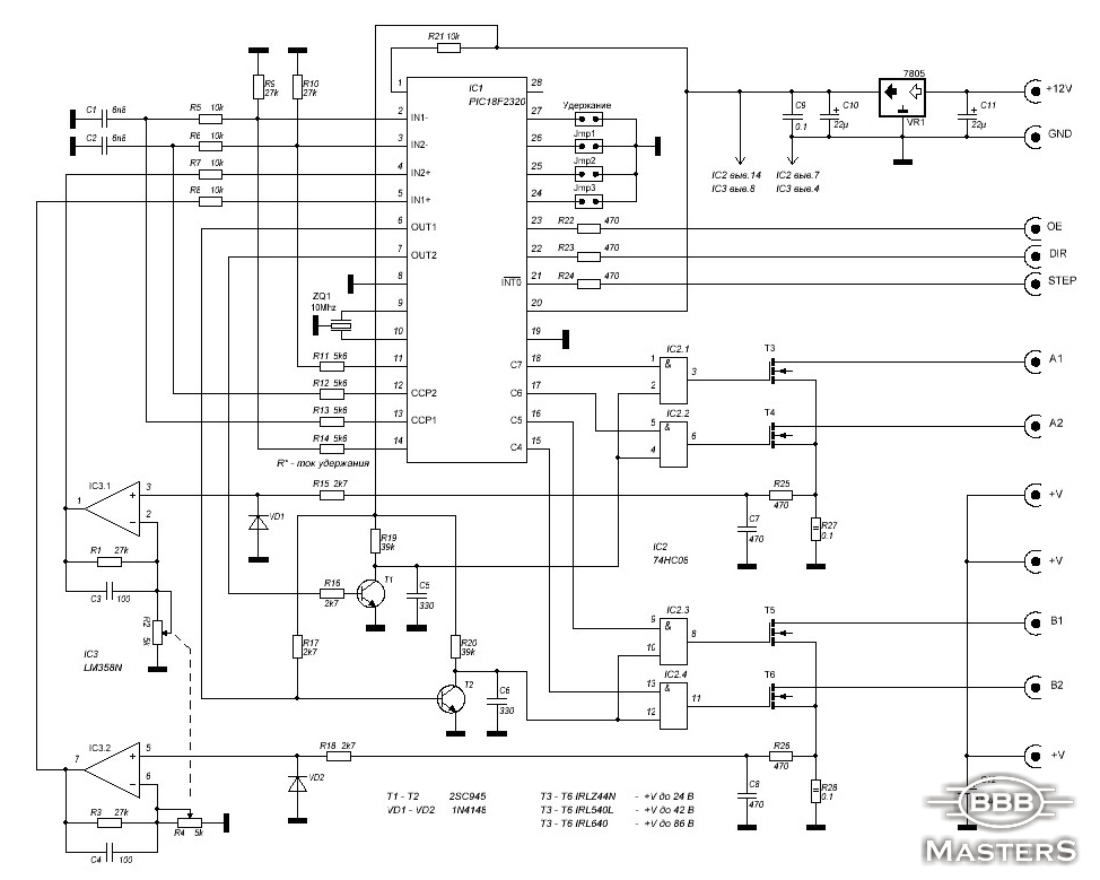 Регулировка тока фаз осуществляется с помощью подстроечных резисторов R2 и R4.
Перемычками Jmp1-Jmp3 на плате переключаются режимы работы «шаг», «полушаг» и «микрошаг»:
В режиме 1 m двигатель развивает большую мощность, чем в режиме 1. Режим 1/2 имеет стандартную реализацию полушага. Режим 1/2 m – с компенсацией момента на валу двигателя.
Прошивка driver41_18F2320.hex с поддержкой режима дробления шага 1, 1m, 1/2, 1/2m, 1/4, 1/8, 1/16, 1/32 была предоставлена пользователем FlashBack нашего сайта.
Режим удержания с понижением тока фаз будет работать при установленной перемычке «Удержание». Ток удержания зависит от номиналов R11 и R14, с уменьшением их номиналов уменьшится и ток удержания. Любое изменение в конфигурации перемычек, требует перезапуск контроллера. Для записи программного кода в МК PIC18F2320 использовался внутрисхемный программатор отладчик PICkit 2.
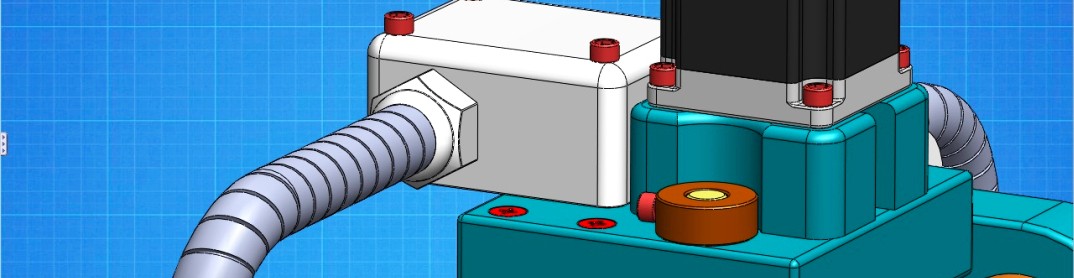
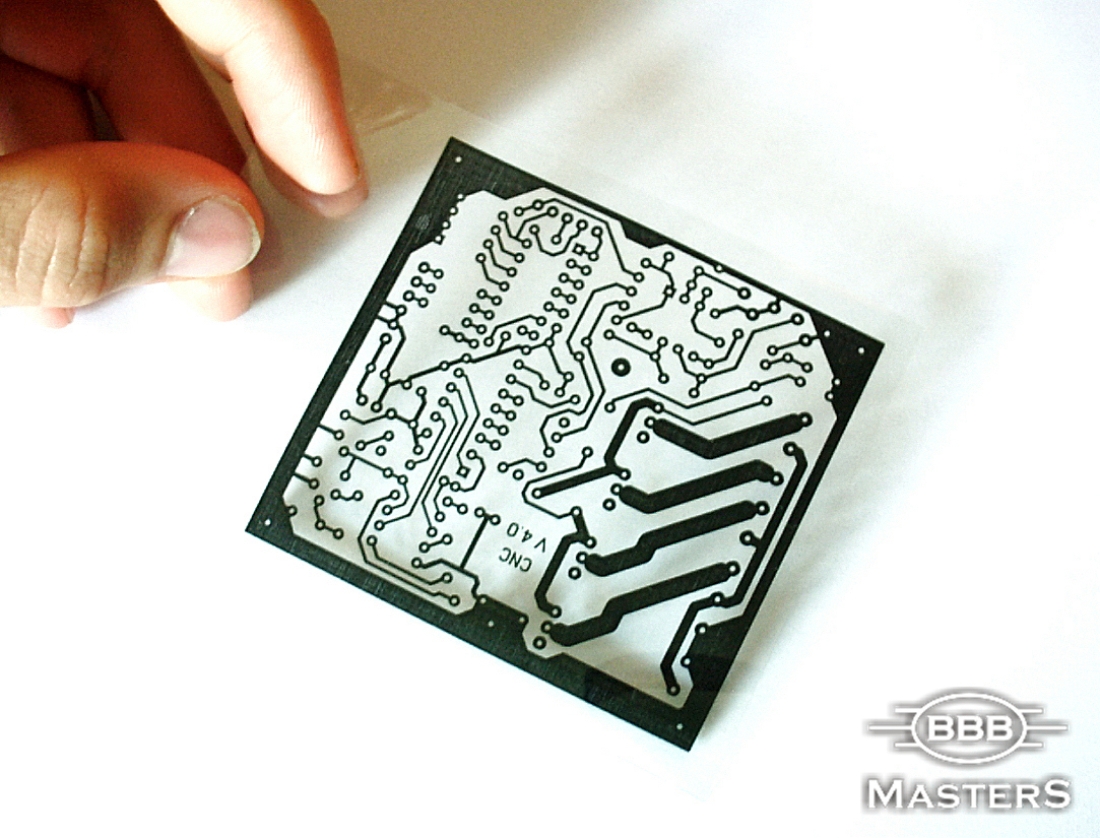
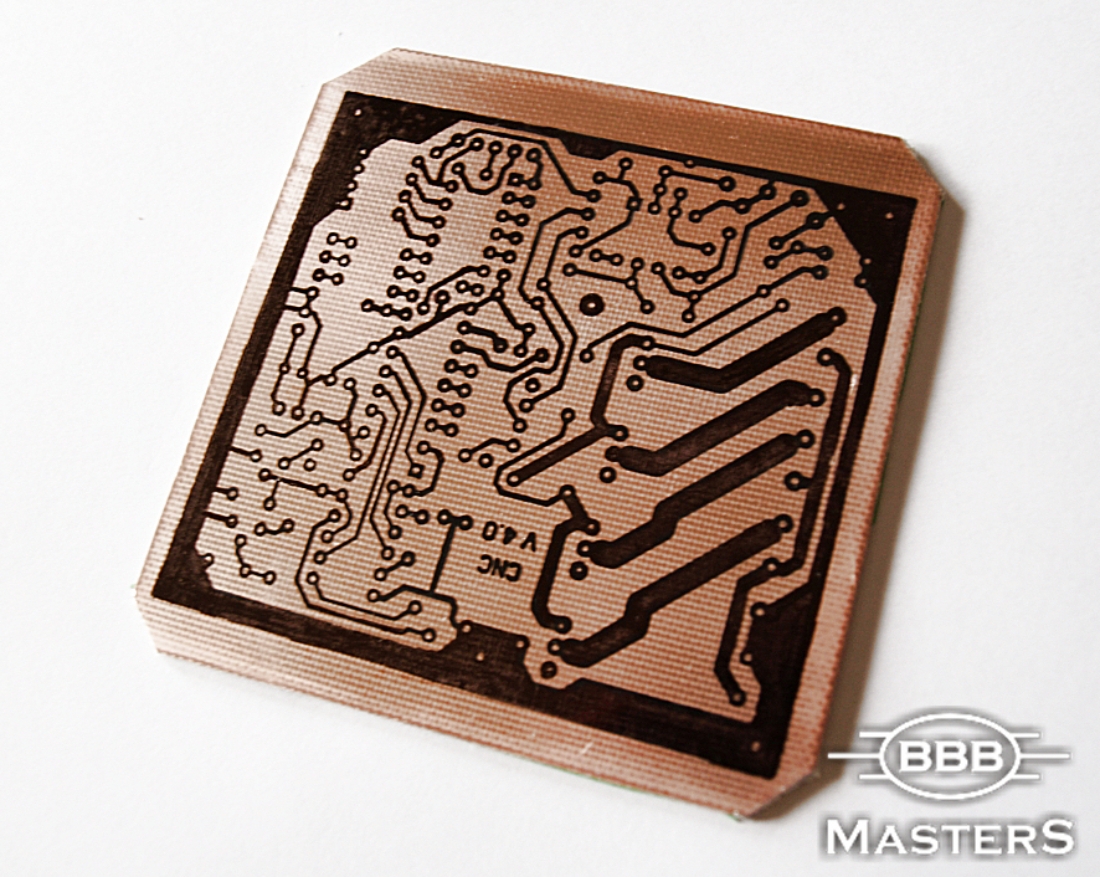
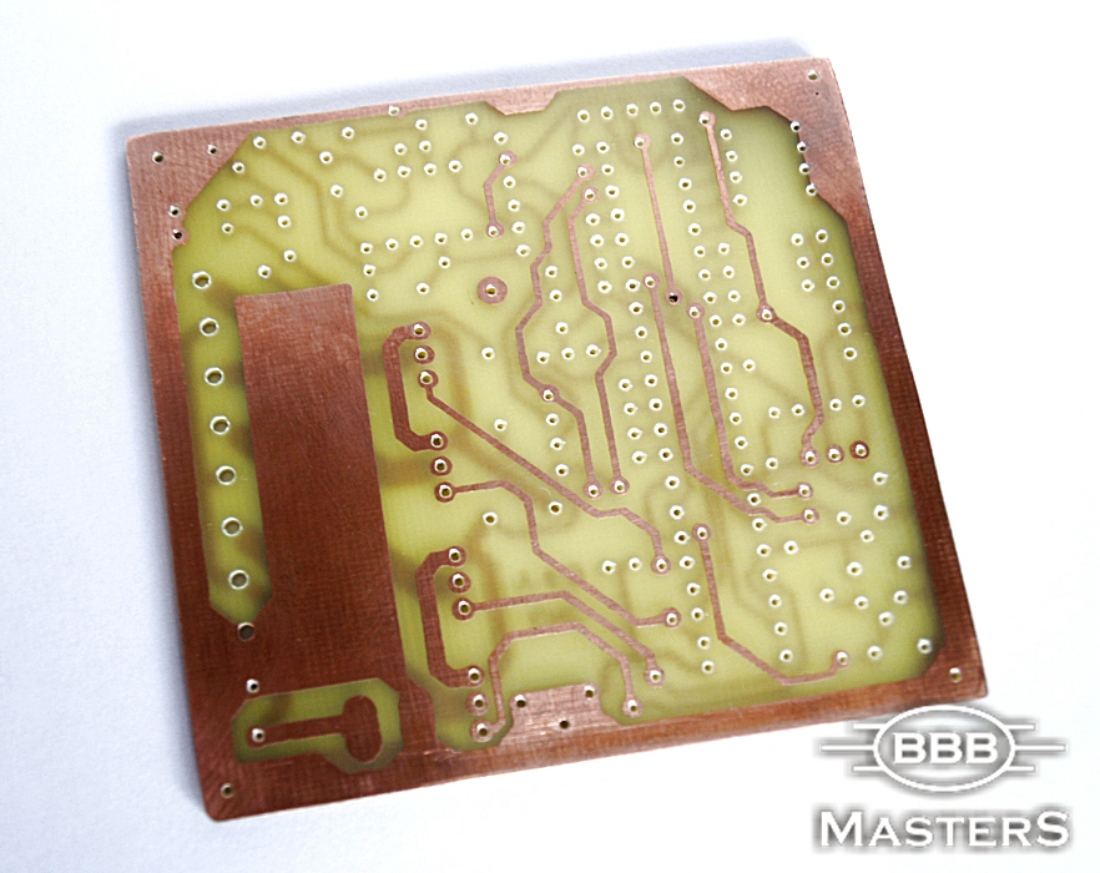
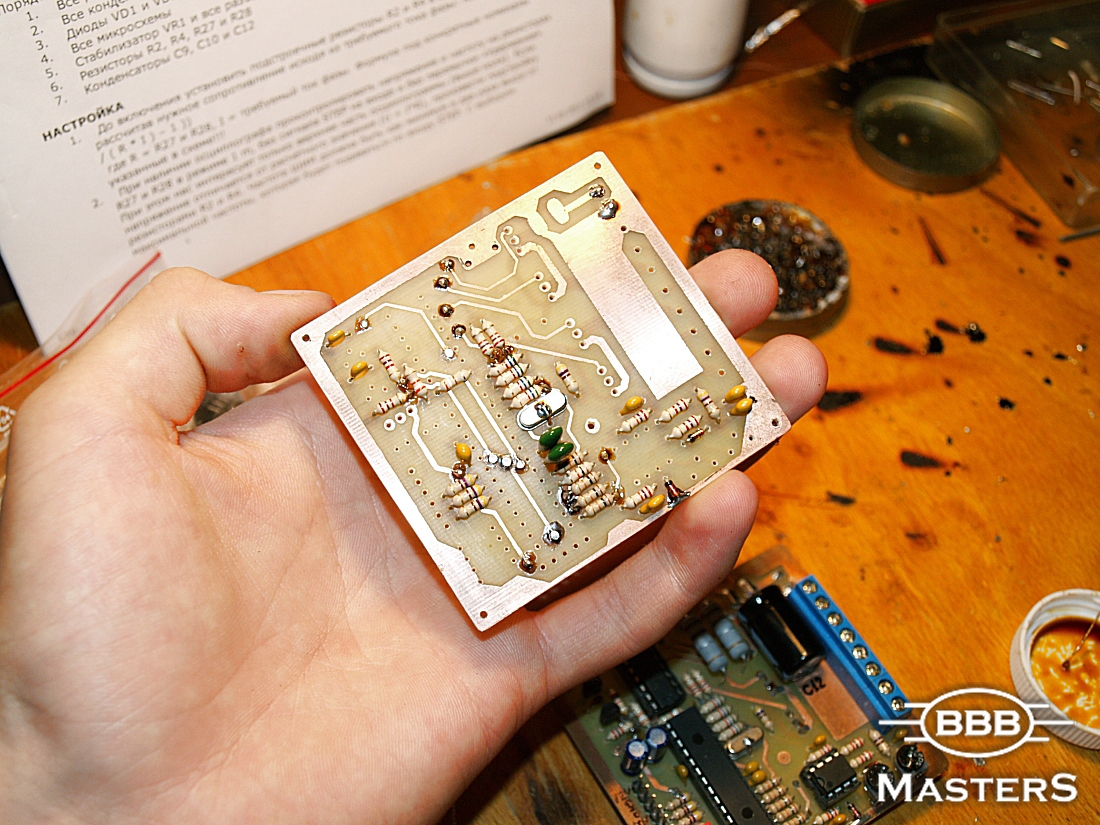
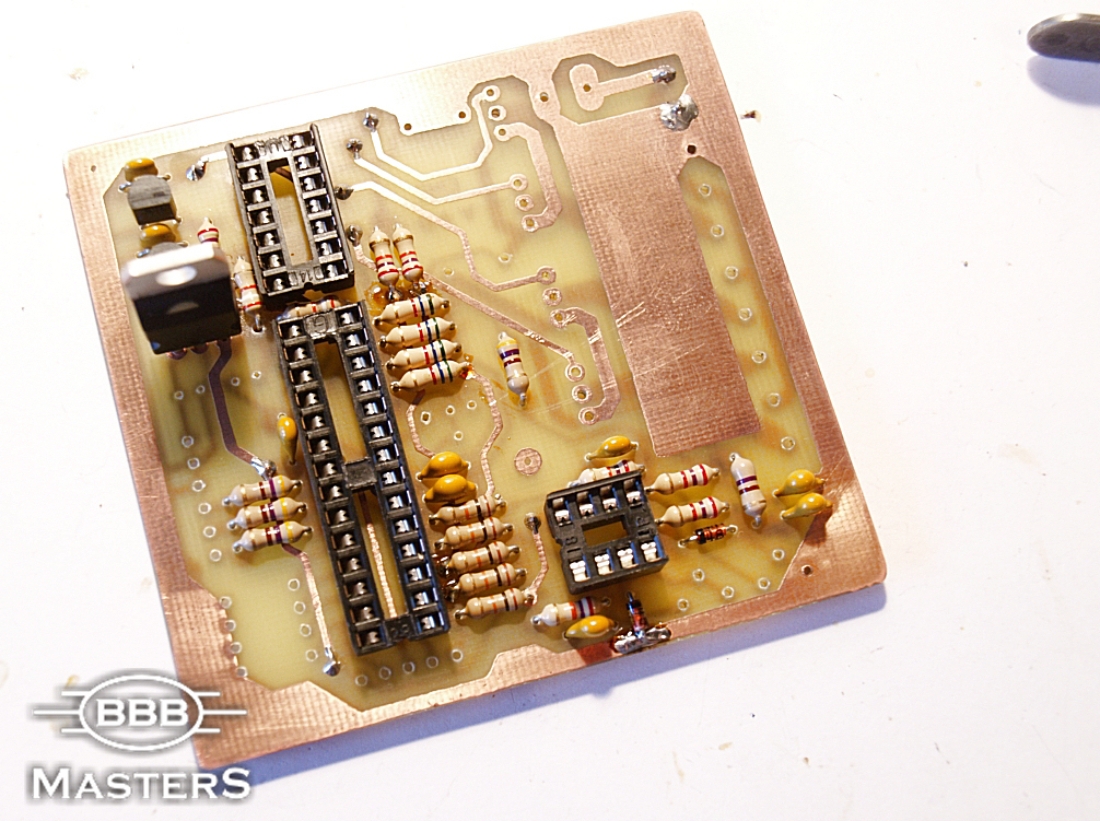
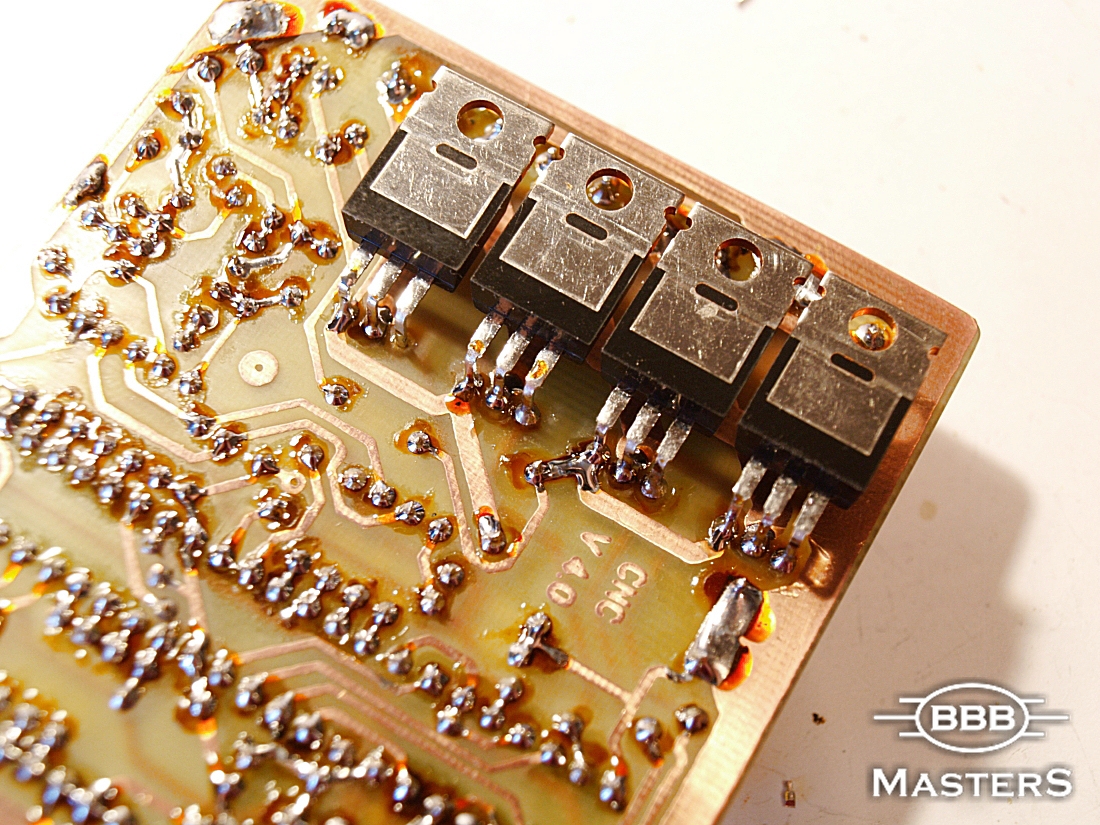
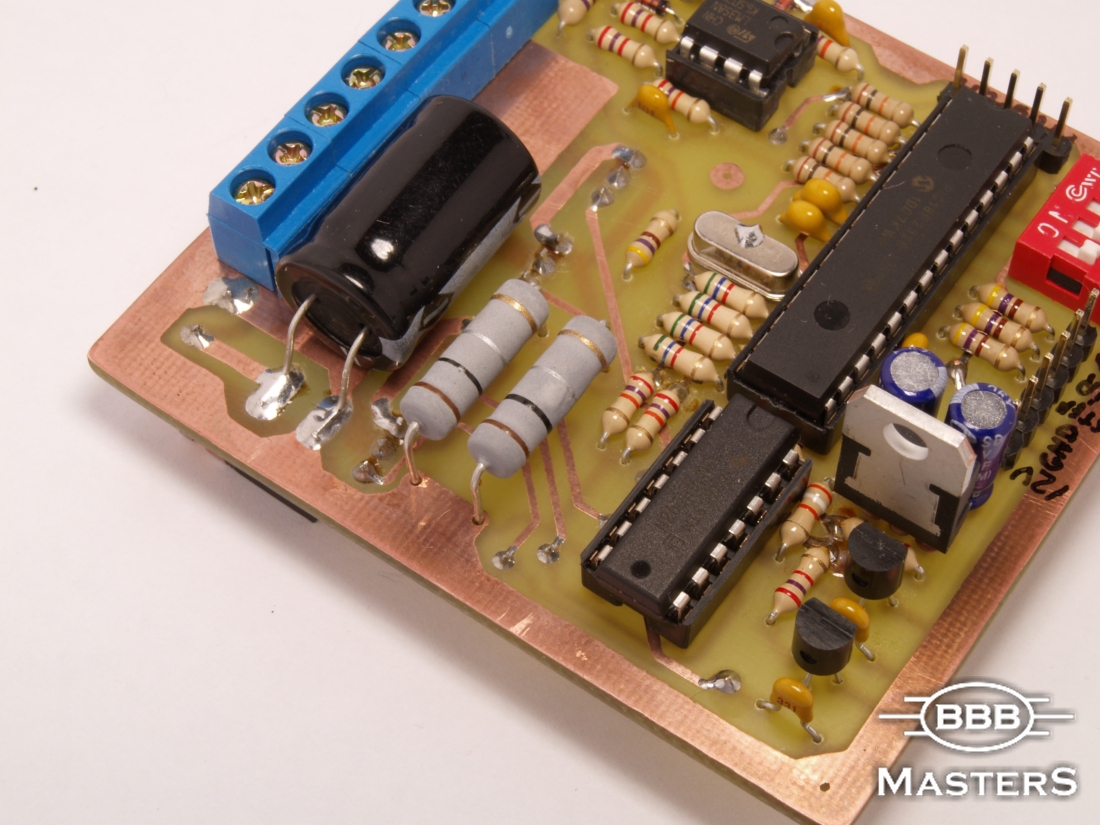
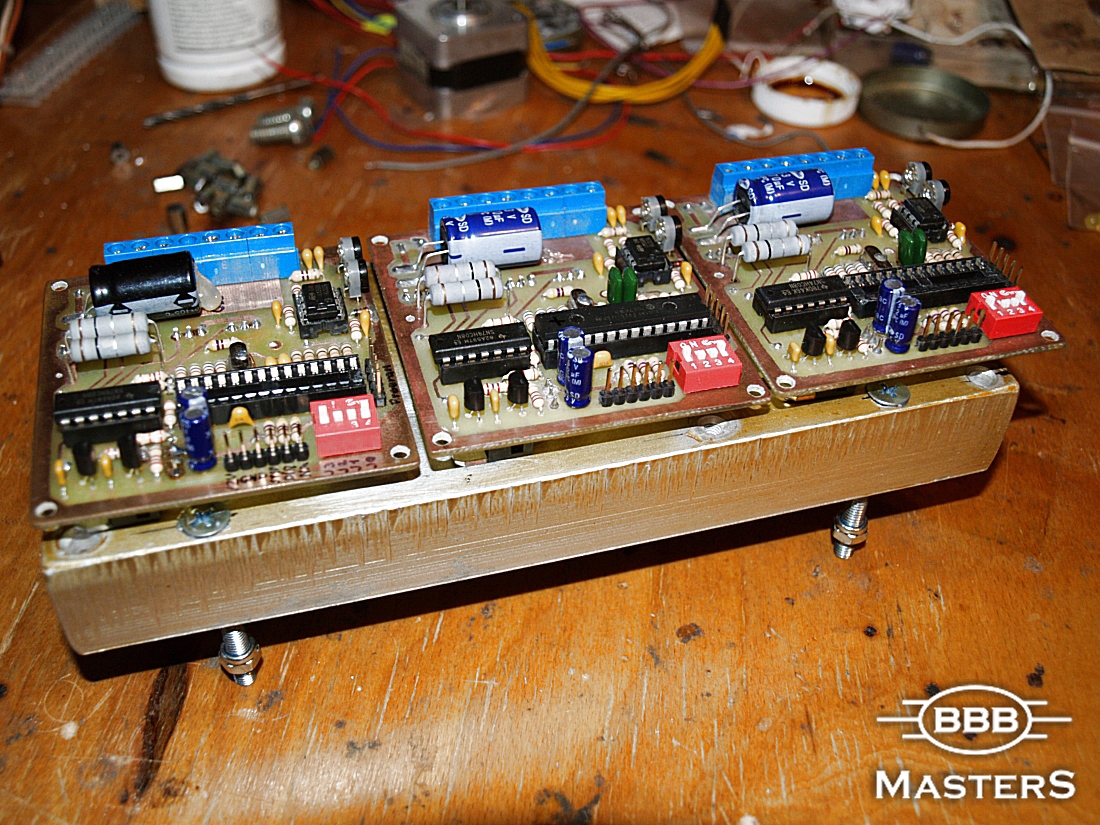
Создатели контроллера униполярного шагового двигателя с сайта RoboZone, тестировали его с униполярным шаговым двигателем PL57H76-3.0-6 (1 Ом, 3 А), нагрев двигателя был в пределах рабочего режима, нагрев контроллера минимальный (подаваемое напряжение 42 В, ток 2,7 А), но радиатор для силовой части крайне рекомендуется (габариты зависят от мощности двигателя). Максимальная частота следования сигнала STEP - 65 кГц. При тестах с выше указанными параметрами и двигателем получили максимальную скорость 1600 оборотов в минуту. В течении 10 минут (дальше просто двигатель рисковали перегреть) на данном двигателе тестировали при токе 5 А. 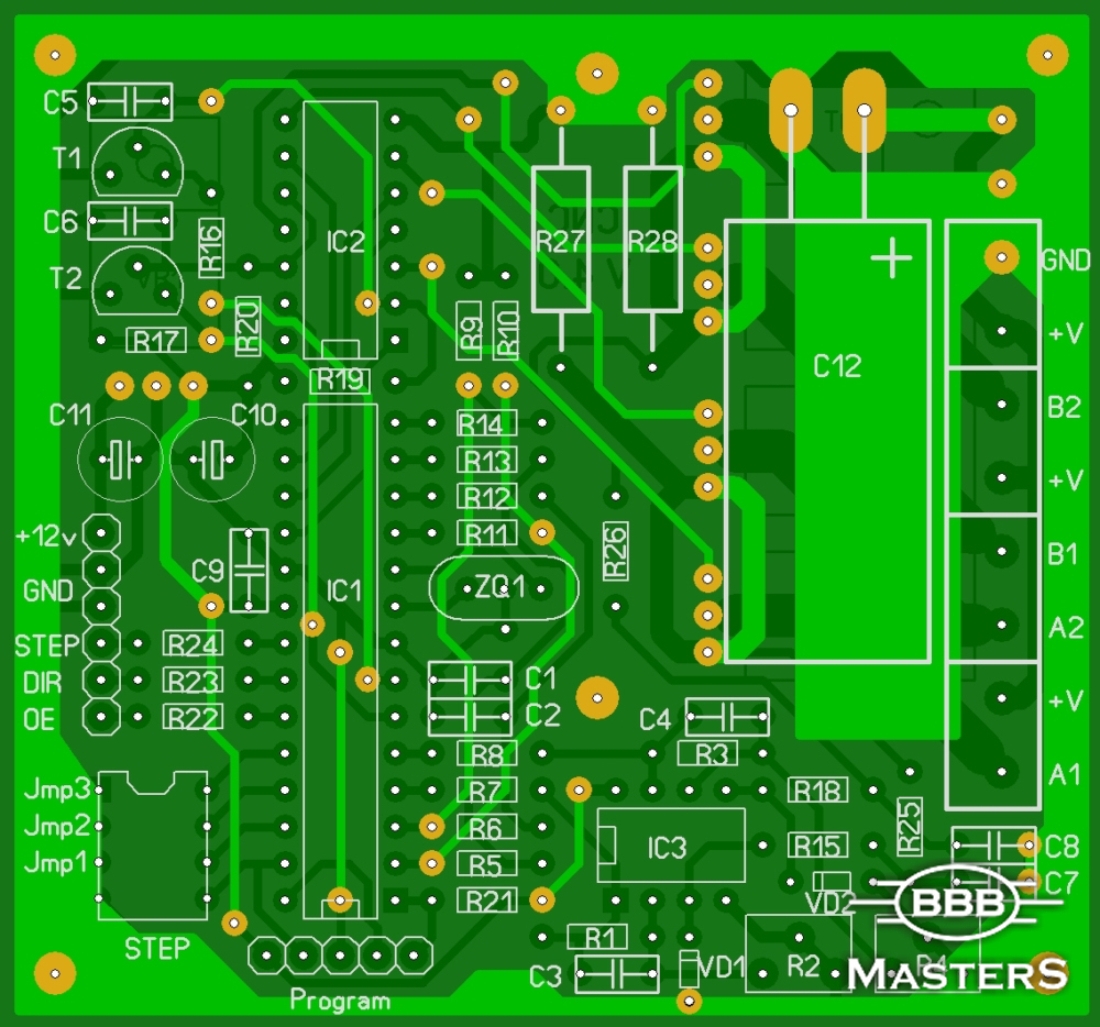   Печатная плата контроллера разведена в двухстороннем варианте, изготовлена по технологии "ЛУТ", был использован лазерный принтер HP 1010, утюг и прозрачная пленка для лазерных принтеров (пленку желательно брать ту у которой есть белая подложка например XEROX). Силовые транзисторы T3 – T6 и стабилизатор VR1 монтируются на плату с нижней стороны печатной платы (пластиком к плате) для удобства крепления радиатора (как на фото ниже). Изоляция транзисторов через теплопроводящие прокладки от радиатора ОБЯЗАТЕЛЬНА!!! Транзисторы не менее чем с двойным запасом по подаваемому напряжению на силовую часть.  При использовании мощных ШД нужно уделить особое внимание блоку питания, он должен хорошо выдерживать импульсную нагрузку и иметь небольшую выходную индуктивность и сопротивление. Питание силовой части подают после того как подали напряжение 12 В. Если питание на силовую часть и на логику подаются одновременно, то необходимо установить резисторы с выводов 15 – 18 IC1 на массу, номиналом 10 – 47 кОм. Так же стоит обратить внимание на то, что данная схема предполагает использование IC2 именно 74HC08, т.к. временные характеристики работы схемы имеют прямую зависимость от данного типа микросхемы. Эксперименты с другими типами полевых транзисторов тоже ни к чему хорошему не приведут. НАСТРОЙКА 1. До включения установить подстроечные резисторы R2 и R4 в одинаковое положение, рассчитав нужное сопротивление исходя из требуемого тока фазы: Rп = 27000 / ( 3,17 / ( R * I ) – 1 )) где R = R27 и R28, I = требуемый ток фазы. Формула под конкретные номиналы указанные в схеме!!! 2. При наличии осциллографа проконтролировать напряжение и частоту на резисторах R27 и R28 в режиме 1 m, без сигнала STEP на входе и без перемычки «Удержание». При этом нас интересует только верхняя часть осциллограммы (выше ноля). Если напряжение отличается от расчетного значения (U = I*R), произвести подстройку резисторами R2 и R4. Частота ШИМ должна быть как минимум в два раза выше от максимальной частоты, которая будет подаваться по входу STEP. С выбором максимальной частоты ШИМ главное не переусердствовать, т.к. при частотах выше 200 кГц полевые транзисторы начинают ощутимо греться. Частота ШИМ зависит от индуктивности обмоток двигателя и номиналов R19, C5 и R20, C6 которые определяют время Toff. Toff = - Ln(1 - Vm/Vp) * R * C [Ln - это натуральный логарифм] где: Vm - пороговое напряжение срабатывания логической 1 по входу IC2 Vp - напряжение питания логики (в данном случае 5 вольт) R - номинал R19, R20 C - номинал C5, C6 Т.е. к примеру Vm = 3,6 вольта и номиналы указанные в схеме: Toff = -Ln(1 - 3,6/5)*39000*0,00000000033 = 0,00001638 сек. Время включенного состояния Ton в данном варианте можно регулировать только напряжением питания силовой части. Хотя в большинстве случаев данное напряжение соответствует именно указанному в т.х. на ШД - source voltage. Процес изготовления блока контроллера шагового двигателя
   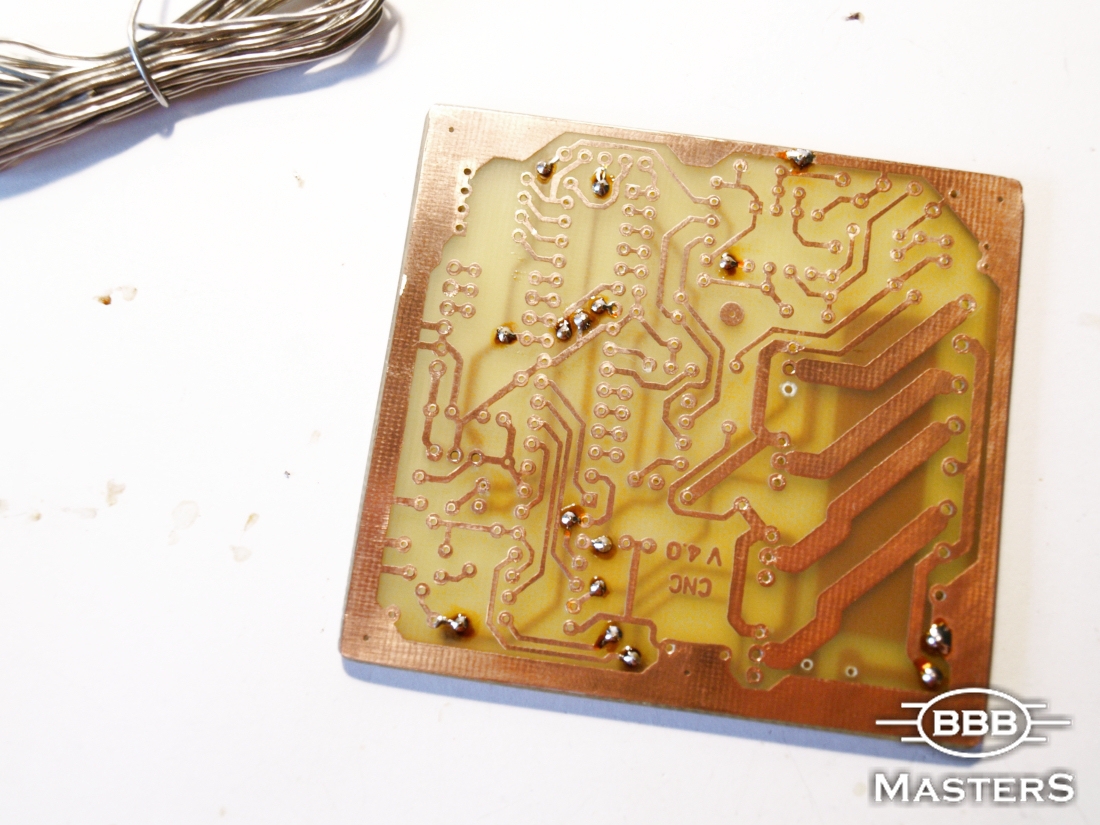 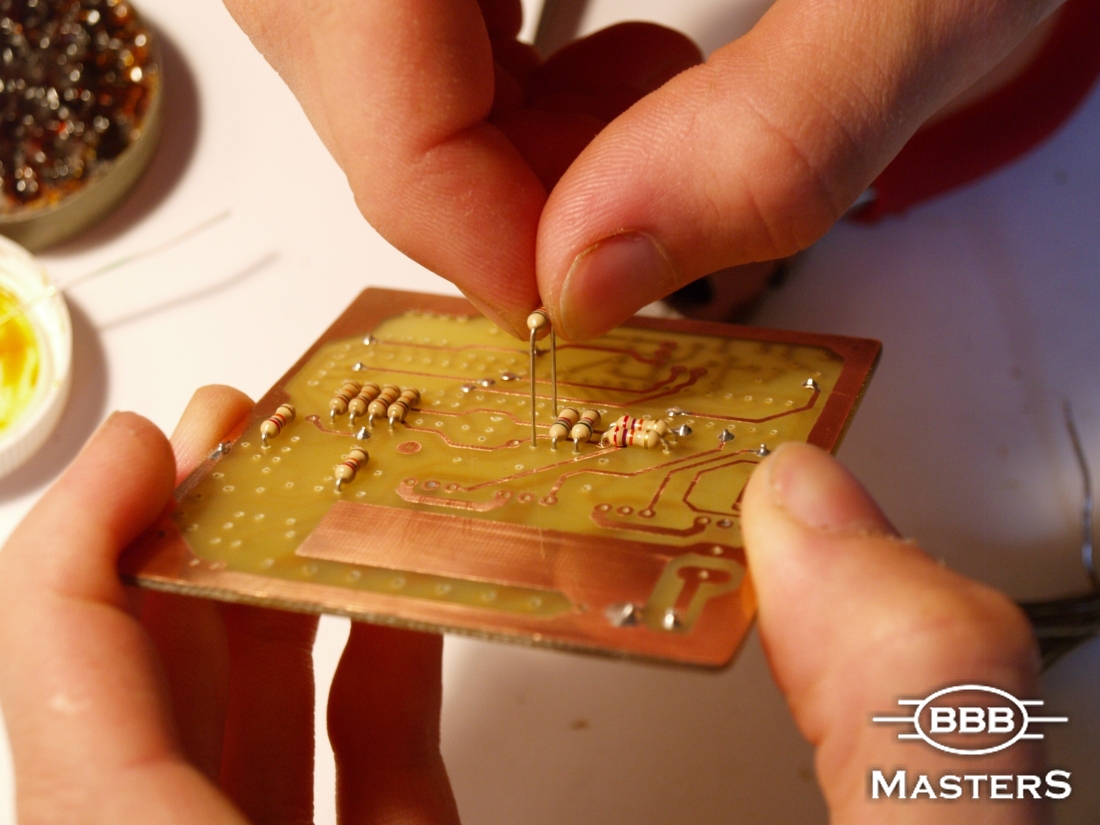 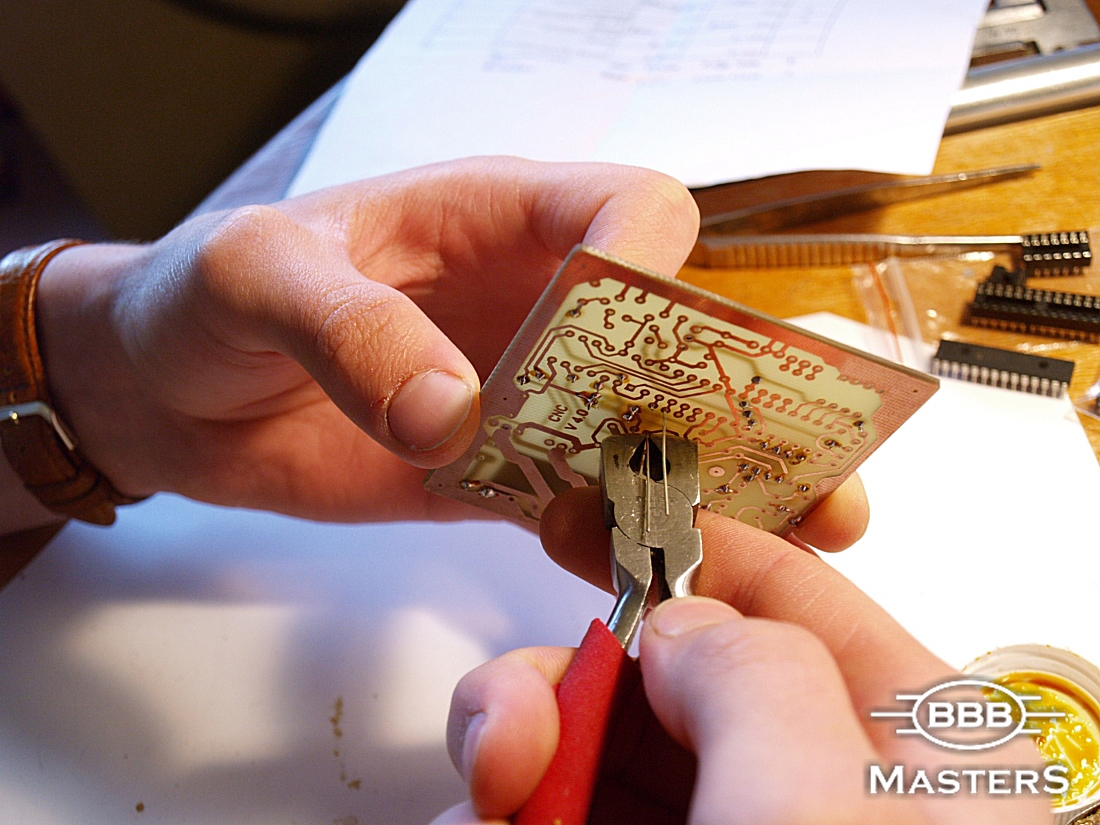       РЕКОМЕНДАЦИИ ПО СБОРКЕ Порядок монтажа, для удобства пайки со стороны деталей: 1. Все резисторы кроме R2, R4, R27 и R28 2. Все конденсаторы кроме C9, C10 и C12 3. Диоды VD1 и VD2, все транзисторы 4. Все микросхемы 5. Стабилизатор VR1 и все разъемы 6. Резисторы R2, R4, R27 и R28 7. Конденсаторы C9, C10 и C12
Скачать формы сигналов в контрольных точках блока, схема блока контроллера в формате sPlan 6.0, разводка печатной платы под "ЛУТ" в формате Sprint-Layout 5.0 и файлы прошивок в формате *.hex вы можете скачать здесь.
|
|
| ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 1 2 3 4 5 6 » | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
 .
.



Навигация
Связь и информация
Счетчик посещений сайта



