Блок контроллера биполярного шагового двигателя на PIC18F2320 V5.1
Контроллер биполярного шагового двигателя на основе микроконтроллера PIC18F2320. Контроллер поддерживает управляющие сигналы STEP, DIR и ENABLE. В контроллере реализован микрошаговый режим и режим удержания с понижением тока фаз. Данный модуль является улучшенной версией микрошагового контроллера биполярного двигателя версии 5.0, в частности, при самостоятельной сборке, более "безопасен" в настройке. Информация
была взята с сайта RoboZone.
Особенности контроллера 5.1:
Аппаратная ШИМ регулировка ограничения тока фаз
Режим удержания при отсутствии сигнала STEP более 2-х секунд
Большой диапазон напряжения и тока фаз (зависит от силовой части контроллера)
Использование универсальных управляющих сигналов STEP, DIR, ENABLE.
Работа в режимах «полный шаг», «полушаг» и «микрошаг» (FULL STEP/ HALF STEP/MICRO STEP)
Частота сигнала STEP до 100 khz
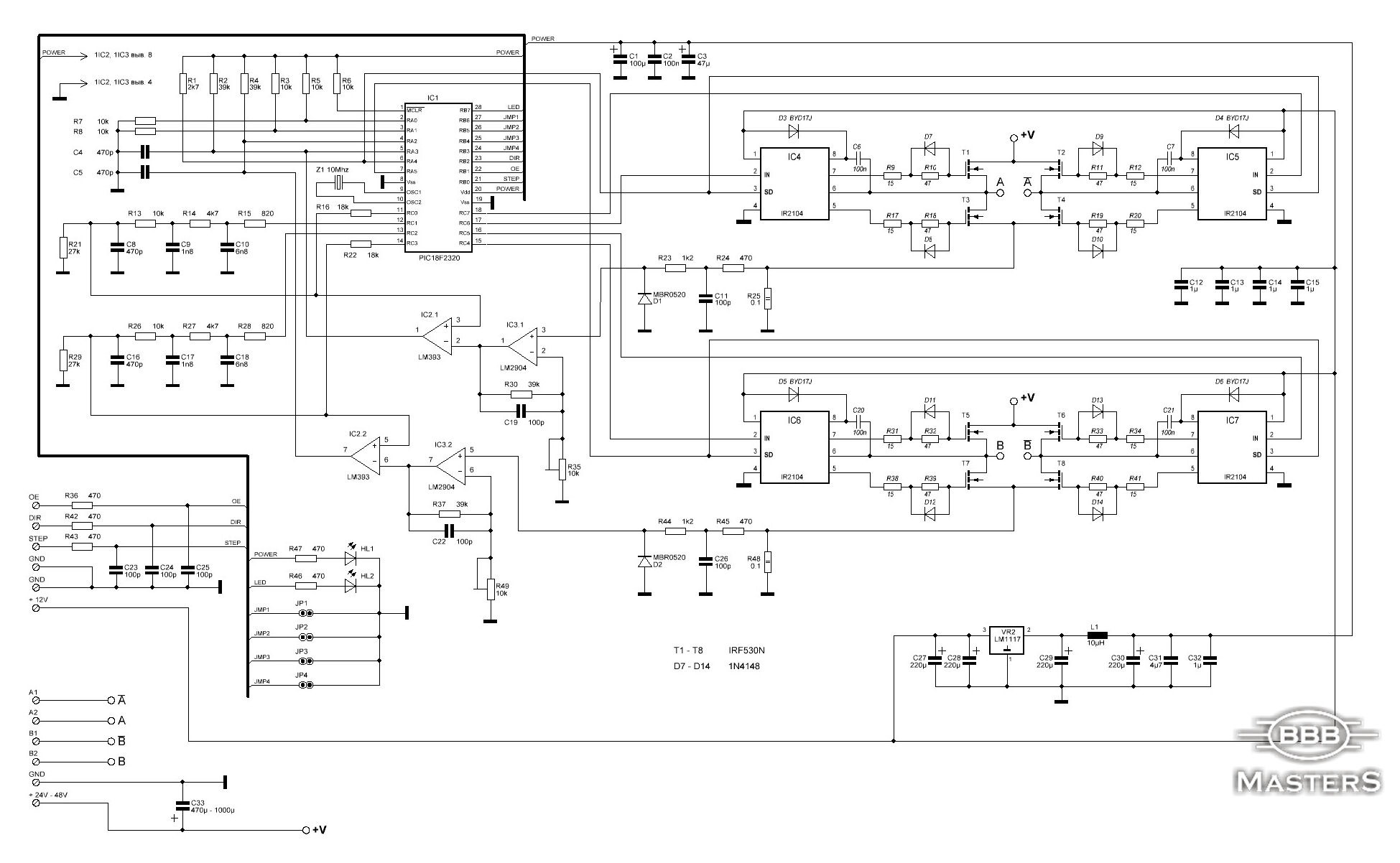
Регулировка тока фаз осуществляется с помощью резисторов R35 и R49. При
указанных номиналах на схеме возможно установить максимальный ток до
6,5 ампер.
Перемычками Jmp1-Jmp3 на плате переключаются режимы работы «шаг», «полушаг» и «микрошаг»:
Режимы работы Jmp1 Jmp2 Jmp3
1 off off off
1/2 on off off
1/4 off on off
Режим удержания с понижением тока фаз будет работать при установленной
перемычке J4. Ток удержания зависит от номиналов R16 и R22, с
уменьшением их номиналов уменьшится и ток удержания. Любое изменение в конфигурации перемычек, требует перезапуск контроллера.
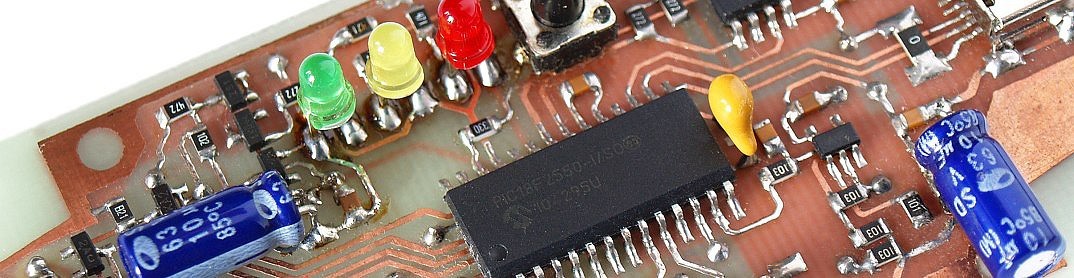
Печатная плата контроллера разведена в двухстороннем варианте под «ЛУТ».
При наведении курсора на элемент - отображается его номинал, поэтому
нумерация элементов не приведена, в архиве для скачки присутствует
"карта" расположения элементов для удобства самостоятельного
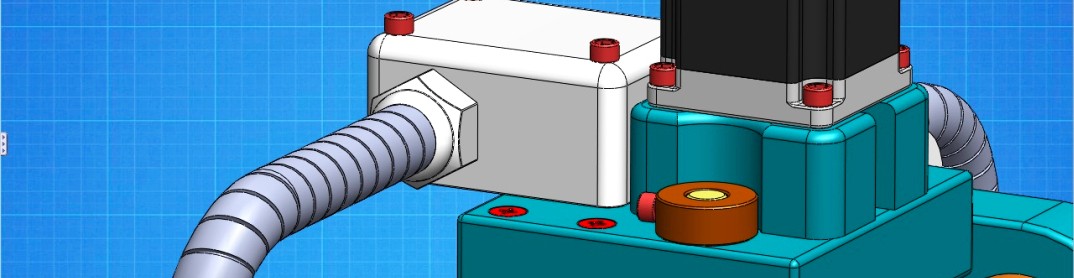
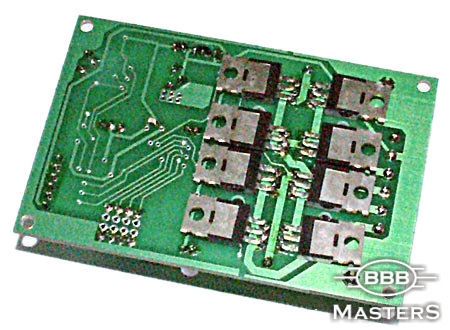
изготовления контроллера. Силовые транзисторы T1 – T8 монтируются на
плату с нижней стороны печатной платы (пластиком к плате) для удобства
крепления радиатора как на фото ниже. Изоляция транзисторов через теплопроводящие прокладки от радиатора ОБЯЗАТЕЛЬНА!!!
Настройка сводится в основном к расчету резисторов R35 и R49 от которых
зависит ток ШД. R35 = R49 = 39000 / ( 3,175 / ( R * I ) – 1 )), где R =
R25 и R48, I = требуемый ток фазы. Желательно проконтролировать величину
выставленного тока на резисторах R25 и R48 осциллографом, т.к. на
практике он получается немного завышен от расчетного, причем чем выше
напряжение питания силовой части, тем больше отклонение. Объясняется
данный эффект задержками в аналоговых частях схемы и конструктива самого
шагового двигателя. Частота ШИМ зависит от индуктивности обмоток
двигателя и номиналов R2, C4 и R4, C5 которые определяют время Toff.
Toff = - Ln ( 0,5 ) * R * C, где R = R2 = R4 и C = C4 = C5. При данных
номиналах Toff = 12,7 мкСек. Рекомендуемые модели ШД для данного
драйвера: FL42, FL57, FL86. Так же возможно использование и старых
двигателей типа ДШИ.
Скачать разводку печатной платы в формате Sprint Layout 5.0 и "карты" расположения элементов на плате, схему в формате sPlan 7.0, прошивку в формате *.hex вы можете
скачать
здесь.
Отлично работает данная схема уже не один год. Перемотал шаговый двигатель по биполярной схеме соединения обмоток проводом сечением в два раза толще . момент увеличился .
30. BBB-Masters 20.10.2017 22:06 Пятница
Здравствуйте, к сожалению такие манипуляции не сработают, поскольку Вы собрали драйвер биполярного ШД V5.1, а драйвер V4.1 для униполярного ШД. Прошивка выдает разные управляющие импульсы. Биполярный ШД имеет 4 провода, а униполярный 6 проводов.
Собрал эту схему и прошил коммерческую прошивку из робозоны. Долго не испытывал но когда решил испытать оказалось что микрошаги разные получились, не те которые заявлены а получились 1/5, и 1/10 и еще там какие то но нет режим полного шага. Вот думаю а не попробовать ли прошивку с версии 4.1 тем более схемы похожи и версия 4.1 работает очень неплохо. Может кто то делал такие эксперименты?
Stesnjashka просто LM1117 без окончания. С33 - напряжение в цепи 24 - 48 В ( реально там больше из-за переходных процессов), выбор зависит от того какое напряжение будет подано на блок контроллера. С27, С28 - напряжение в цепи питания 12 В. С29, С30, С31, С32 - напряжение после LM1117 около 5 В. Везде запас по напряжению, в разумных пределах, не помешает.
В Москве нет SMD? На SMD деталях проблем с работой платы будет меньше. IR2104 меньше бракованных, большая помехозащищенность. Не всякая разводка платы будет работать нормально. Меня отговорили от монтажа на обычных элементах. Купил наборы сопротивлений и конденсаторы и это в магазине в провинции. Вариант приобретения через почту в интернет магазинах. Я восстановил лазерный принтер, сделал низковольтный миниатюрный паяльник, добился качественный ЛУТ монтаж и это при минимуме затрат, что для меня важно. Советую собрать как здесь.
Пробовал контроллер в работе http://www.youtube.com/watch?v=gn_a9LFhti0 Испытал и на униполярном шаговом двигателе при последовательном соединии обмоток.
Добрый день. Пробовал ли ктото данный драйвер в работе. Возникали проблемы с незакрытием транзисторов после прекращения подачи управляющих сигналов на МК?
21. BBB-Masters 10.03.2015 15:38 Вторник
В схеме была ошибка, теперь она устранена. Эта точка перемыкала цепи 12В и 5В.